装置設計で機械の動きを表現する場合、
コンフィギュレーションを用いることがあります。
コンフィギュレーション機能は、
1 つのドキュメント内に
形状違いなど複数の部品やアセンブリモデルを作成できます。
例えばシリンダなどの装置設計で動きをみる際に
コンフィギュレーションを用いた場合は
「最大」や「最小」といった特定の位置の状態を再現できます。
コンフィギュレーションの追加はこちらから
設計をするときに、
「実際の動きを確認しながら設計をしたい」
と思ったことありませんか?
今回ご紹介するコマンドを使用することで、
部品がどのように動くのかを表現することができます。
2回に渡ってご紹介する内容はこちら☟
第1弾 【制限合致】
第2弾 【サブアセンブリのフレキシブル化】
今回は、設定をするにあたっての準備段階
【制限合致】
です。
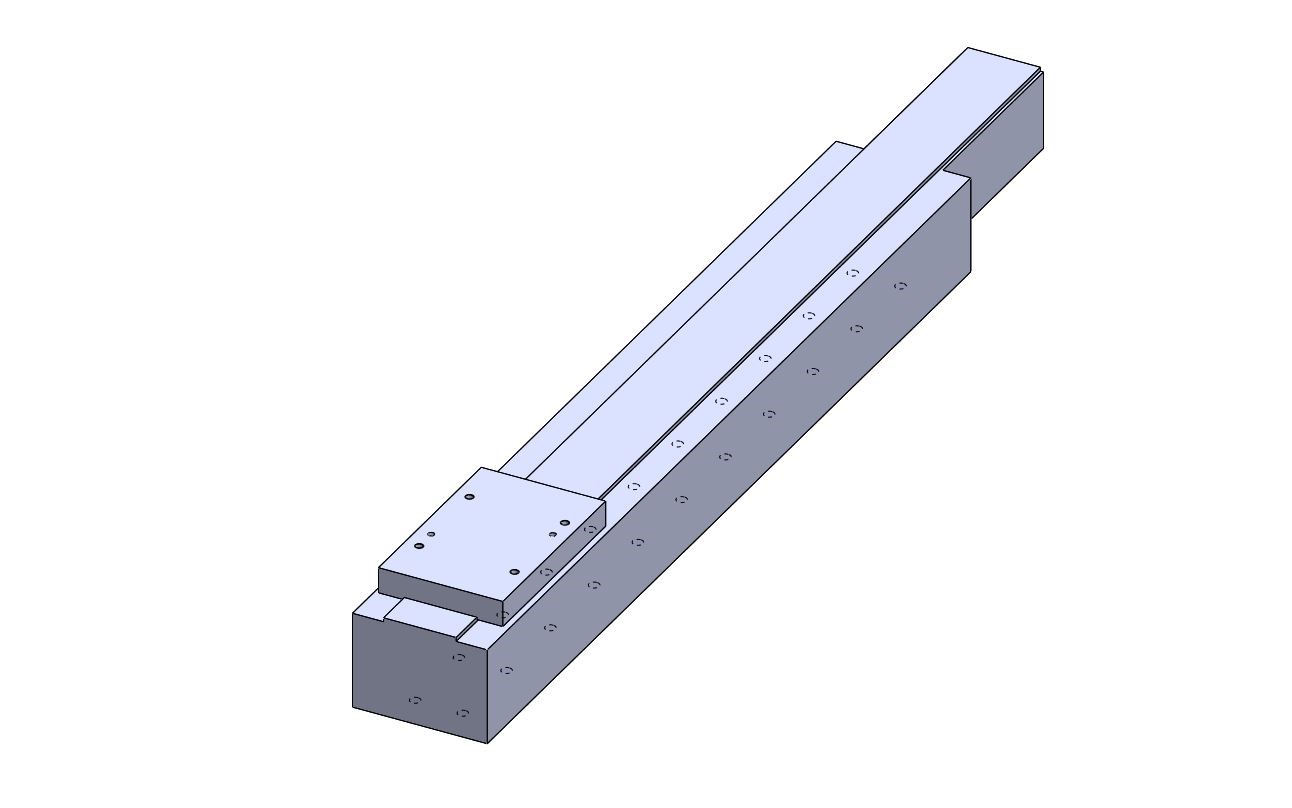
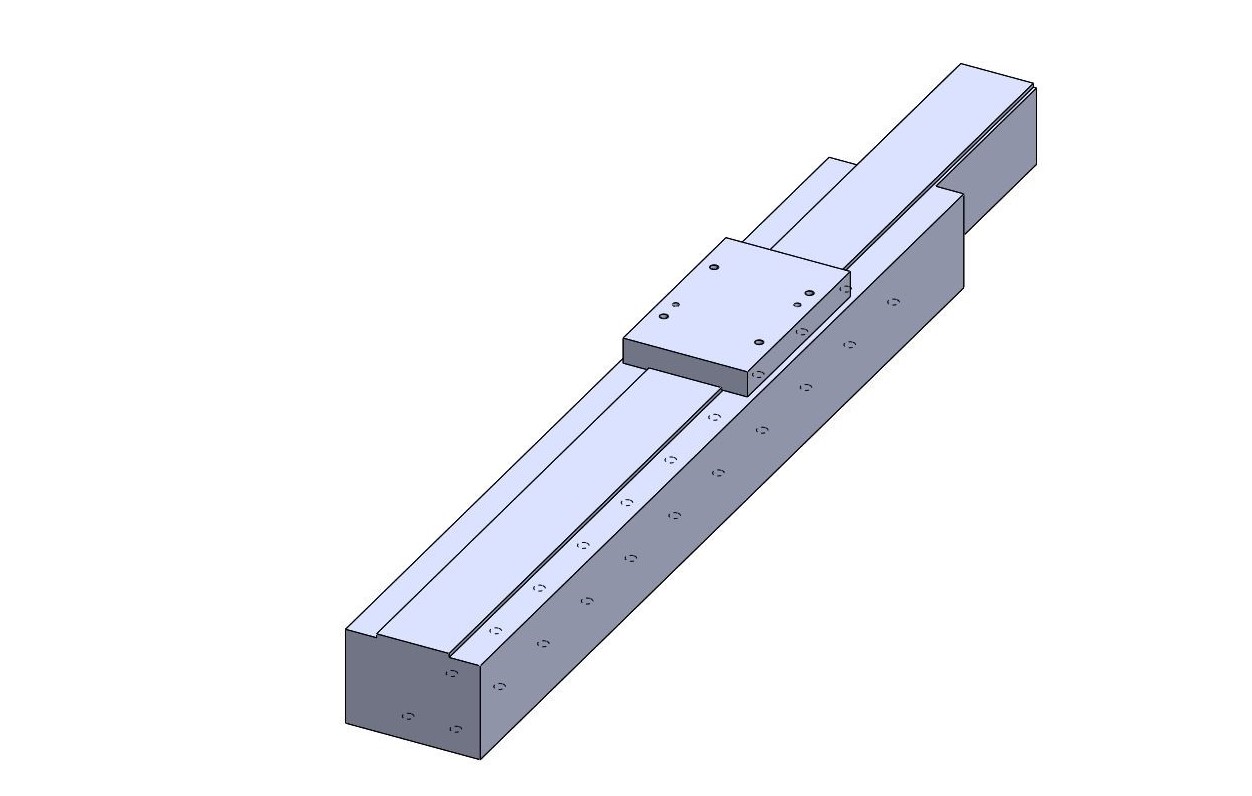
まず、動きを持たせたいアセンブリを用意します。
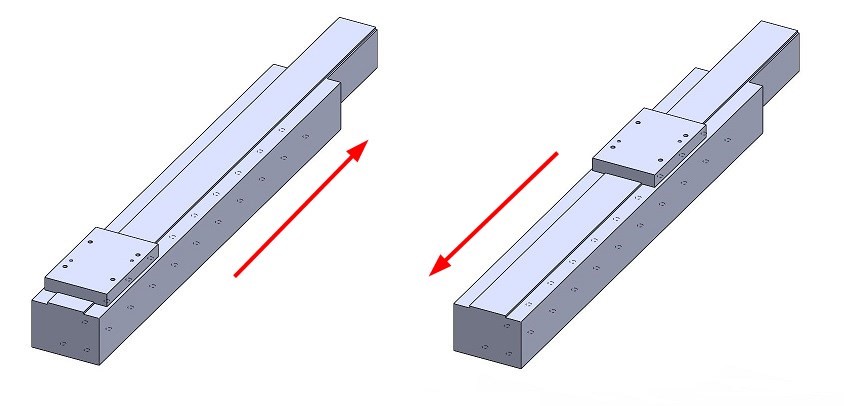
今回は、テーブルが下記の設定で移動します。
・テーブルの中心と下部品の端の移動量250mm
最小値:70mm(下部品端から)
最大値:320mm(下部品端から)
移動前(最小値)
移動後(最大値)
それでは、距離を制限した合致をつけましょう。
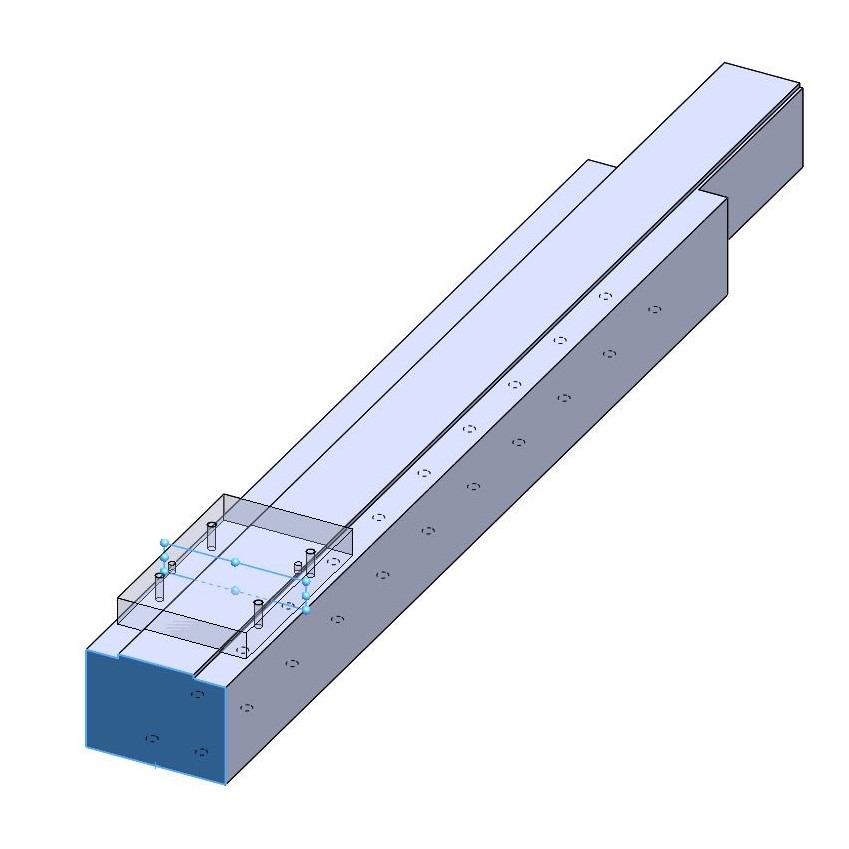
アセンブリタブ→「合致」コマンドをクリック。
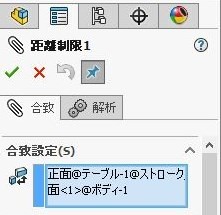
合致設定に、図の2つ面を選択します。
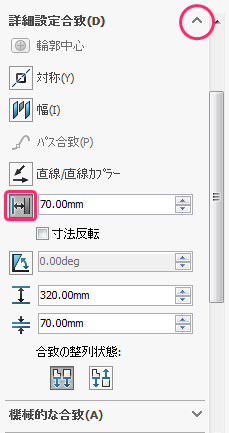
「詳細設定合致」を展開し、「制限合致」をクリック。
距離に最小値:70mm(下部品端から)が選択されます。
最大値と最小値を設定します。
最大値:320mm(下部品端から)
最小値:70mm(下部品端から)
合致コマンドを終了します。
移動距離を制限した合致をつけることができました。
距離制限をつけたことにより
テーブル可動域の範囲で移動します。
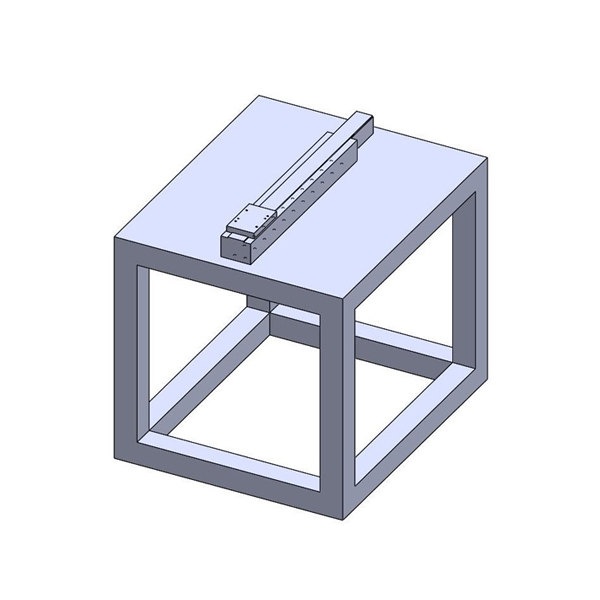
次回は、このアセンブリ部品を
実際の装置(トップアセンブリ)に挿入して動かします。
【サブアセンブリのフレキシブル化】
ご期待ください。